磁力链接由一组参数组成,参数间的顺序没有讲究,其格式与在 HTTP 链接末尾的查询 字符串 相同。通常是一个特定文件的内容 散列函数 值形成的URN。
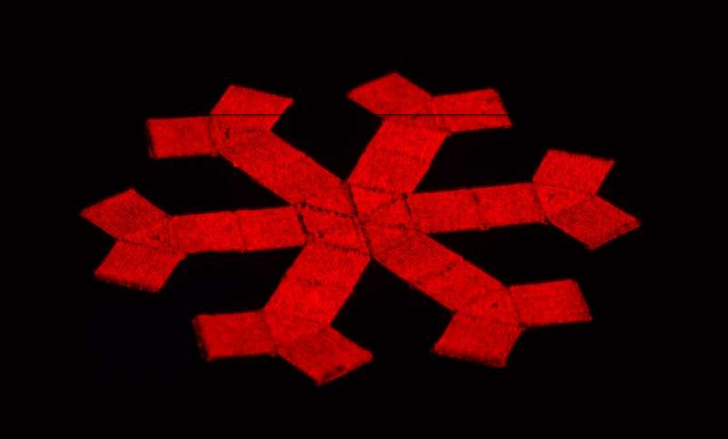
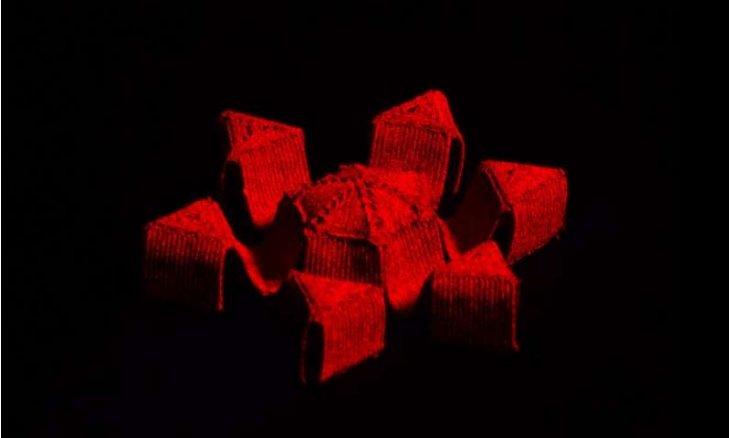
蜘蛛状抓取器(六足结构)(上图:打印前;下图:打印后)麻省理工学院的工程师们发明了一种柔软的3D打印结构,其运动可以用磁力来控制,就像没有弦的木偶一样能被磁化控制的复杂结构包括一个光滑的环状褶皱,一个可以挤压闭合的长管,一张可以折叠的面板,还有一个蜘蛛状的“抓钩”,它可以爬行、滚动、跳跃,并以足够快的速度抓住传球。
该成果于6月13日发表在《自然》杂志上研究人员使用了一种新型的、注入了微小的磁性颗粒的3D打印墨水制造出以上结构他们在3D打印机的喷头bt磁力搜索上安装了一个电磁体,当墨水通过喷头输入时,磁性微粒就会向单一方向摆动。
通过控制结构中各个组分的磁场方向,研究人员制造出的结构和设备可以瞬间转变成复杂的结构,甚至可以在各个部分响应外部磁场时四处移动麻省理工学院机械工程系和土木与环境工程系的Xuanhe Zhao教授表示,该技术可能被用于制造磁控生物医学设备。
种子搜索引擎 -磁力岛官网:http://www.cilisouou.com
该团队的磁激活结构属于软驱动装置的范畴——柔软的、可塑的材料,它们被设计成通过各种机械手段来变形或移动例如,当温度或pH变化时,水凝胶装置膨胀;形状记忆聚合物和液晶弹性体在足够的刺激下(如热或光)发生变形;气动和液压bt磁力搜索装置可由泵入其中的空气或水驱动;介电弹性体在电压作用下拉伸。
但是水凝胶、形状记忆聚合物和液晶弹性体反应缓慢,需要一定时间才能内改变形状空气和水驱动设备需要管道将它们连接到泵上,这使得它们在远程控制应用中效率低下介电弹性体需要高电压,通常在1000伏以上“目前还没有软体机器人能在像人体内部一样的密闭空间里进行任务,这就是为什么我们认为磁驱动的概念有很大的希望,因为它是快速的,有力的,身体友好的,并且可以远程控制。
”文章的作者之一Yoonho Kim说道研究小组没有使用相同方向的磁性粒子来制造结构,而是寻找创造磁性“域”的方法——每个部分都有不同方向的磁性粒子当暴露在外部磁场中时,每个部分都应该以bt磁力搜索不同的方式运动,这取决于粒子对磁场的响应方向。
通过这种方式,小组推测结构应该可以进行更复杂的连接和运动使用新的3D打印平台,研究人员可以打印出一个结构的部分或区域,并通过改变打印机喷嘴的电磁铁方向来调整特定领域内磁粒子的方向该团队还开发了一个物理模型,可以预测打印出来的结构在磁场下会如何变形。
考虑到印刷材料的弹性、结构中域的格局以及施加外部磁场的方式,该模型可以预测整体结构的变形或移动方式除了一个波纹状的圆环、一个自挤压管和一个蜘蛛状的抓地器,研究小组还打印了其他复杂的结构,比如一组“增大”结构,这些结构迅速地沿着两个方向收缩或扩张。
“我们开发了一个打印平台和一个预测模型供其他人使用人们可以设bt磁力搜索计自己的结构和领域模式,用模型验证它们,并打印它们来实现各种功能通过对结构、领域和磁场等复杂信息的编程,甚至可以打印出机器人等智能产品”Zhao介绍道。
编译:Coke 审稿:alone 编辑:张梦 来源:https://techxplore.com/news/2018-06-magnetic-d-printed.html
相关标签:
相关推荐

如今我们处在信息爆炸与资源茧房的尴尬境地中,如何打破这个门槛,获取信息与资源对等。或许磁力链接能够有效的帮助我们。我把这个问题抛给gpt—4,得到以下回答:磁力资源的最大特点就是急速,可靠,不受人为因素干扰,地域限制。比如我想寻找一个古老,经典的黑白默片,在你周围的信息分类中,甚至都没有听说过默片,但在...

探索磁力搜索的奇妙世界:不止于下载在信息爆炸的数字时代,我们每天都被海量的数据包围。从学习资料到娱乐影音,从软件工具到稀有文献,互联网如同一个无边无际的知识海洋。在这个海洋中航行,有时却会遇到暗礁与迷雾——那些难以寻觅、散落在各处的内容。这时,“磁力搜索”便如同一张精准的海图,为我们指引方向,触达那...
本站收录的网站若侵害到您的利益,请联系我们删除处理!| 联系QQ:1445202313 请注明来意! Copyright © 2023 磁力导航网站 All Rights Reserved. 鲁ICP备2024071926号-1 XML地图 cilisouou.com



")